Nabanita
Dash

I am working on task/motion planning problems under the supervision of Prof. K Madhava Krishna at RRC lab, IIIT Hyderabad, India.
My primary interests encompasses SLAM (Simultaneous Localization and Mapping), 3D Reconstruction, 3D Scene Understanding, and SIM2REAL applications within the field of quadruped robots.
Collaborations
I delve into other areas including reinforcement learning, large language models, photogrammetry, and differential privacy. I welcome discussions on potential collaborations and am open to exploring new ideas. If you’re interested in collaborating with me, please feel free to reach out via email or discord!
news
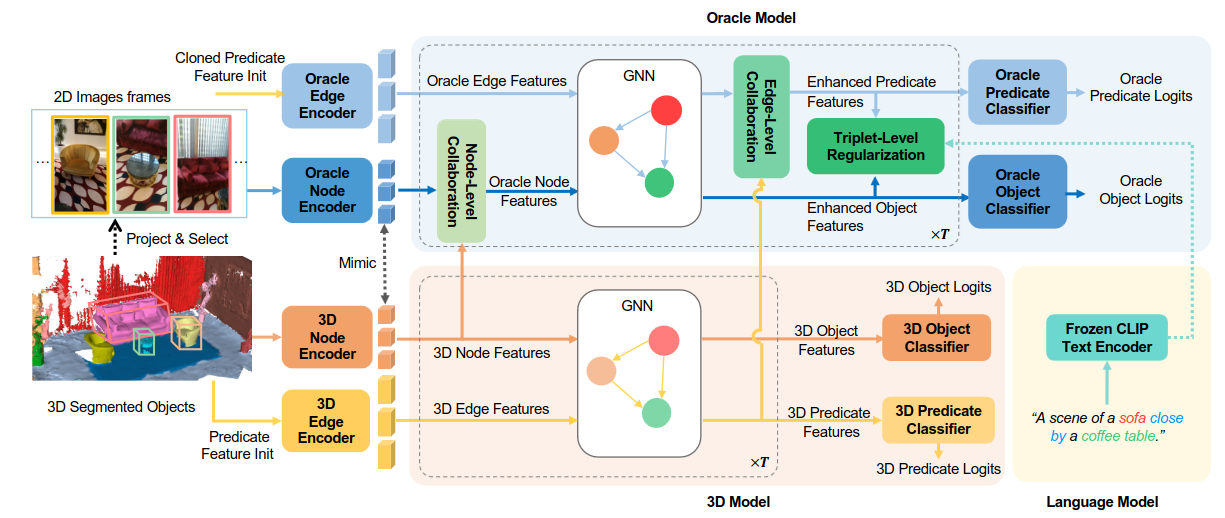
| Feb 23, 2024 | My paper on [RE] A Reproducibility Study on Scene-Graph Generation from 3D Point Clouds: Hybrid Approach with Clip, 2D Image Semantics, and 3D Geometry has been accepted for peer-review at TMLR! |
|---|---|
| Jan 3, 2024 | My book Parallel and Distributed Computing with Julia in Data Science got published! |
| Dec 5, 2022 | I have started working as a research engineer at Recherche Antimodular. |
| Oct 3, 2022 | I signed the contract to publish my book titled “Parallel and Distributed Computing with Julia in Data Science” with Orange AVA Publications Limited. |
| Jun 15, 2021 | I graduated with Bachelor’s degree majoring in Computer Science and Engineering from IIIT, BBS with a 3.8836/4.0 |